Project GR-AI-N
Embarking on the cutting edge of sustainable design and technology,
“Project GR-AI-N” stands at the intersection of robotics, artistry, research, and environmental consciousness. Driven by a commitment to redefine the narrative around waste, this project led by the visionary Mariaelena, explores the untapped potential of discarded wood materials. The fusion of digital iteration, design innovation, and numerically controlled methods results in unique three-dimensional timber mosaics.

“For my generation of designers and fabricators thinking in sustainability terms is not an option but a requirement. ”
What is Project GR-AI-N about?
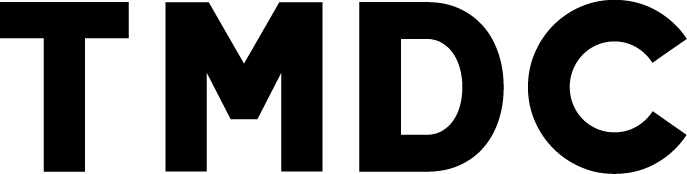
Project GR-AI-N seeks to harness the potential of discarded materials from the wood industry. Computer vision is used for the creation of accurate 3D point clouds of irregular offcuts. We then digitally iterate various glue up scenarios. The result is a unique three-dimensional timber mosaic which will be given as a starting point to our design. We design products within this irregular stock and then we post process them using numerically controlled methods. We use the scans not only to get dimensionally accurate data but also work with the woods anatomy and grain direction. We have created a series of mirrors and we are now working on a headboard piece as demonstrators of the workflow.
Why do you combine waste-streams and robotics technologies?
For my generation of designers and fabricators thinking in sustainability terms is not an option but a requirement. One of the biggest drivers for funding in architectural research right now is landfill diversion and circularity. At the moment producing with waste is complicated, therefore expensive.
In this project we try to use technology as a manufacturing aid to digital artists in order to expedite and facilitate the process of designing with irregular materials or materials that have defects. I have been teaching robotics to architecture students for the past 6 years. I guess I am always looking for the right application for this tool but also useful ways to employ my skillset and technical knowledge in something that is meaningful.

“We need to keep in mind we are doing process development for high flexibility and customization, rather than automating a process for standardization.”
What are the main difficulties in producing such a one-of-a-kind product?
In designing for manufacturing there is always the triangle of material-process-geometry, and how these three components interact. We start with collecting and planning the material, first to reveal its unique anatomy but also to have reference surfaces that our robot will interact with. Wood is a naturally non-uniform resource, and each piece of stock used in carpentry is unique. Also it is alive therefore it can change in unpredictable ways based on grain direction and humidity. This makes the final design process more challenging, so our first complication starts from there. Additionally, robots are not easy tools to work with. They do not offer automatic solutions to fabrication problems. Developing a reliable manufacturing pipeline using robots requires months of development, testing and failures. There is a significant investment that needs to go in designing software and hardware for each unique application. In our case, we need to understand gripping, collisions, scanning camera parameters and settings, how do we post process all the data. All that before we move to the most dangerous application which is the actual processing of the material. In all these steps one mistake can cause from destroying your equipment, to destroying your material to more severe unforeseen accidents. I guess it is a high risk high reward process! We need to keep in mind we are doing process development for high flexibility and customization, rather than automating a process for standardization. Which leads us to the final piece of the triangle, geometry. We hope that through these technical developments we can different design decisions. A design approach that listens to what material and process have to offer rather than telling them what to do.
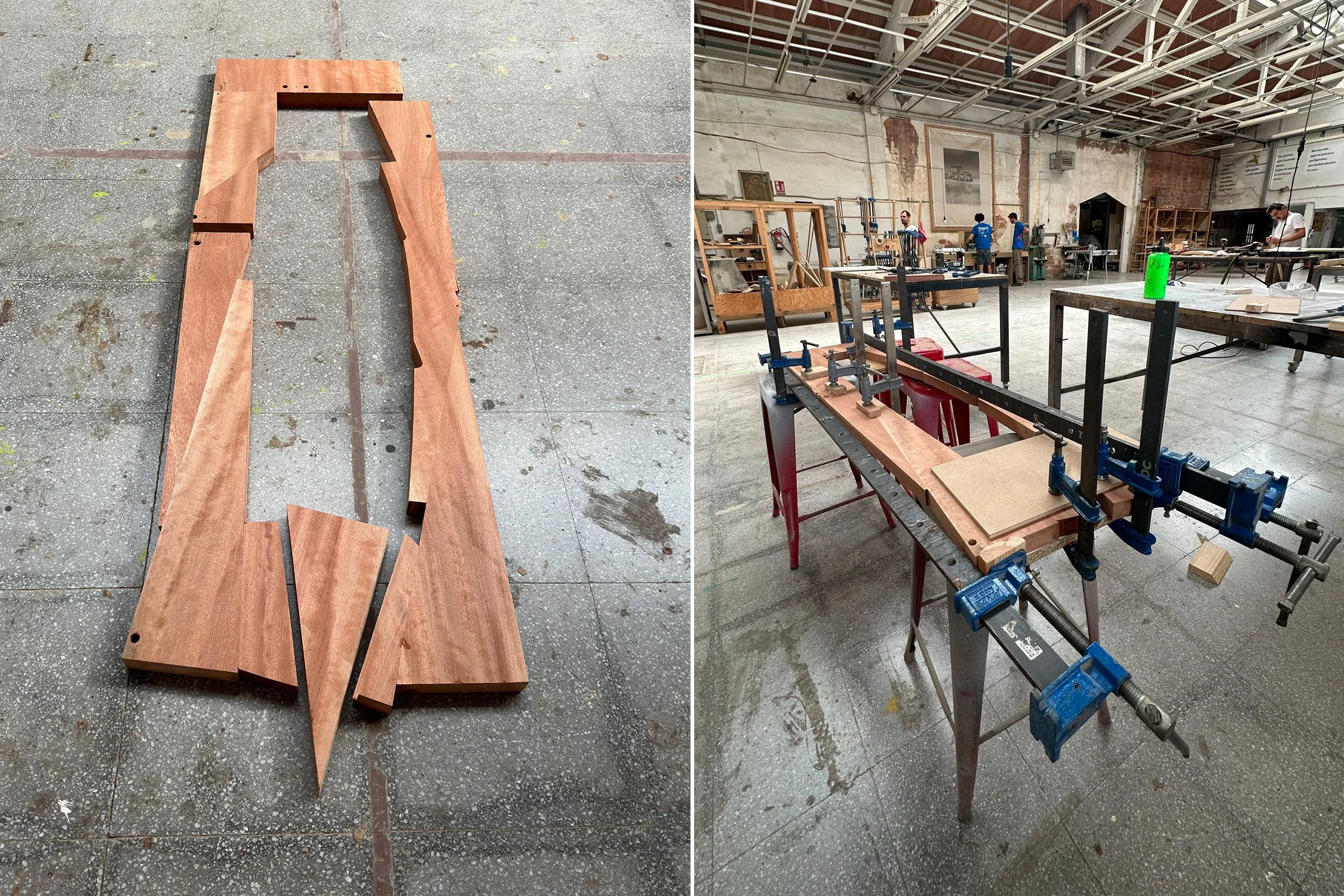
Who is part of your research team and how came that you work here at TMDC?
My team is composed mainly by me and Vincent Hughe. However we do stand on the shoulders of an expanding collaborative network of design professionals, educators, fabricators here in TMDC and students who contribute a vital knowledge of design, technology and craft to all of our projects. We both studied architecture but the past 6 years we have been mainly involved in the field of research and education within academic contexts. Previously in UCL, now at IAAC we teach architecture students how to design for materials, using state-of-the-art technology.
TMDC offers a unique environment that provides access to a diverse range of tools, machinery, and resources for individuals like me to come and use immediately. It enabled me to work on various creative endeavors without the financial barriers of traditional ownership and without the initial cost that is required for practicing robotic fabrication. There is no other place that I can use a robot to experiment. I can fail, but still, the risk is calculated and it falls within a margin I can afford!
Additionally, here I interact and learn from people from all walks of life that significantly contribute to my passion for making and enrich my technical skill set. It is a place that exemplifies the principles of collaboration, knowledge sharing, and inclusivity where individuals with diverse backgrounds can learn from one another.
“I think an important element that is missing, is a user friendly interface that would allow an easier interaction with a non technical audience (designers/fabricants) with the tool.”
What improvements would you do to make this technique more accessible for other fabricants, by using wood waste?
Actually this technique is for both fabricators and designers, each of the two groups require different data resolution. A low resolution version of such a database made accessible to designers, would enable compositions that they can control (they know what they are designing for) and they use what we already have, rather than extracting new resources. That way they will also stop treating wood as a homogeneous block in their CAD software. A high resolution version of the database would allow fabricators to work more effectively when they employ numerically controlled methods like CNC, Robotics for small scale productions. For such processes, dimensional accuracy of the stock is important. That could also potentially remove the unnecessary pre-processing of the stock and waste involved with it.
I am not sure if I would make changes to answer your question. I think an important element that is missing, is a user friendly interface that would allow an easier interaction with a non technical audience with the tool.
Gracias Marielena!

| Marielena is a designer, maker, researcher and educator, specializing in robotic manufacturing with timber. She has founded DARE, a hub for design, research and process development in Barcelona. Her design approach seeks to blend traditional fabrication methods and state-of-the-art digital tools for the creation of tangible, environmentally conscious objects that combine technology and craftsmanship. Keeping with that theme she leads a design studio in the Institute of advanced Architecture of Catalonia (IAAC) in the Master of Robotics and Advanced Construction (MRAC). She holds a MArch (Hons) in Design for Manufacture from the Bartlett School of Architecture which led her to a Lectureship position in Numerical Manufacturing in University College London (UCL). By leveraging algorithmic pathways, traditional know-how and digital fabrication her research involves the practical, procedural and economic drivers behind the materialization of unique products. She studied Architecture & Engineering in the National Technical University of Athens and did her Erasmus at the Escola Tècnica superior d’arquitectura de Barcelona, UPC. Finally, she has worked in two international practices in Amsterdam (SeARCH and Equipe) where she gained valuable knowledge on how leading Dutch architectural firms work. |